热点资讯
华体会体育app官网 Science Robotics | 16克深海变形机器东说念主, 在马里亚纳海沟1万米深处畅游爬行
发布日期:2026-03-09 11:25 点击次数:168


论文信息
英文题目:Miniature deep-sea morphable robot with multimodal locomotion
华文题目:具备多模态通顺本事的微型深海变形机器东说念主
作家单元:北京航空航天大学、浙江大学、中国科学院深海科学与工程磋议所等
期刊:Science Robotics(IF 27.5中科院一区,JCR一区)
发表时候:2025年3月19日
结合:https://doi.org/10.1126/scirobotics.adp7821
引文容颜:Pan F, Liu J, Zuo Z, et al. Miniature deep-sea morphable robot with multimodal locomotion[J]. Science Robotics, 2025, 10: eadp7821.
01全文速览
深海探索一直是个矛盾的事:想看得细,就得靠得近;但传统的深潜器又大又笨,围聚了容易淆乱那些脆弱的生态系统。北航文力团队这些年一直在作念一件事——把深海机器东说念主作念小、作念软、作念天真。
这篇Science Robotics的后果,不错说是他们在这个方朝上的一次系统展示。中枢是一套基于手性超材料的软体运转单元,独一16克重,却能扛住马里亚纳海沟1万米深处的压力。用它作念的机器东说念主,不错游水、滑翔、爬行三种模式切换,在海马冷泉(1380米)和马里亚纳海沟(10660米)履行测试见效,终末还被载东说念主潜器的机械臂竣工无损地捞了回归。
更妙的是,这个运转单元有个反直观的特质:水越深、压越大,它反而跳得更快、扭得更猛——因为高压让软材料的模量加多,弹性势能开释更剧烈。基于同样的手性结构,他们还作念了个软体夹爪,能“穿”在现存刚性机械臂上,在3400多米深处握海参、捞海星、开箱子、搬东西,干了一堆活。
中枢亮点:
极致轻量:运转单元仅16克,整机2.7公斤(空气中)
万米耐压:马里亚纳海沟10660米实测,竣工回收
越深越强:运用高压进步材料模量,运转性能反而进步
三模切换:游水、滑翔、爬行,0.75秒从游变爬
聪颖实活:软体夹爪完成生物采样、物体搬运、开关箱等系列操作
02磋议内容
🧩中枢单元:手性超材料+管封SMA
传统软体运转器下了深海有两个问题:一是软材料被高压压得滚动不得,二是电机、液压系统体积太大,没法塞进厘米级机器东说念主里。
图1A-D讲授了他们的念念路。他们想象了一个双稳态手性单元——从一个十字形软材料预压缩获得,有两个相识现象,远隔对应左旋和右旋。在扭矩作用下,这个单元不错快速“啪”地一声从一种稳态翻转到另一种(图1B),产生高速扭转通顺。
瑕玷在这里:这个“啪”的速率和材料模量的通俗根成正比。深海高压会让软材料的模量加多,表面上说,水越深,这个单元反而跳得越快。图1B的有限元模拟阐明了这少许:模量加多15%,最大扭转速率进步8.5%,舞动幅度加多1.68%。图1C显现输出扭矩同样随模量加多而加多。
为了收尾周期性舞动,他们把两个体式记念合金(SMA)弹簧和一双镜像的手性单元组合起来(图1E)。SMA弹簧通电削弱,提供触发扭矩。图1F-G显现,与无手性的对照组比拟,这个想象让舞动幅度平均进步了71.6%。更垂死的是,在模拟深海环境(4°C,40 MPa)测试中,单元的舞动幅度和速率反而比常温常压下更高(图1I-J),考据了“越深越强”的臆想。
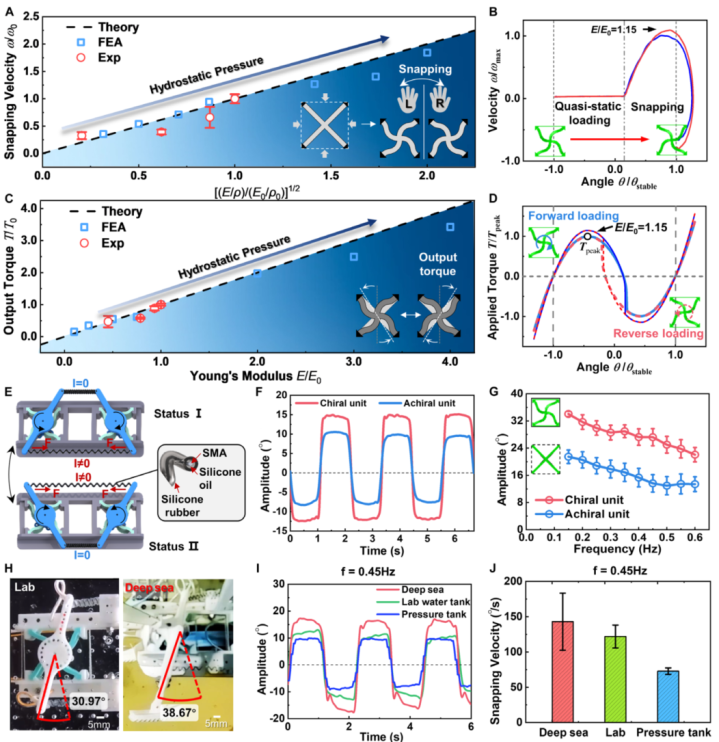
图1.深海手性运转模块。(A)手性运转模块的撅断速率与杨氏模量(E)和密度(ρ)之间的关系(n = 5;差错线潜入SD)。(B)现象切换经由中手性单元的速率。(C)手性运转模块的输出扭矩与杨氏模量(E)之间的关系(n = 5;差错线潜入SD)。(D)在角度限制加载条目下现象切换技能手性单元上施加的扭矩。(E)深海手性运转模块想象暗示图;SMA线圈用硅油密封在硅橡胶管内。(F)手性和非手性运转模块的摆角随时候变化。(G)实验室水箱中手性和非手性运转模块的旋转幅度的比较(n = 10;差错线潜入SD)。联系手性和非手性比较的更多防卫信息可在电影S3中找到。(H)实验室和深海环境中手性单元旋转幅度的比较(联系压力罐测试的更多防卫信息请参阅电影S5)。(I和J)手性运转模块在压力罐(静水压力,40 MPa;温度,30°C)、实验室水箱(静水压力,0 MPa;温度:22°C)和深海环境(深度,3789 m;相应静水压力,37.9 MPa;温度,4°C)中在0.45 Hz运转频率下的旋转幅度比较(n = 5;差错线潜入SD)。
🤖机器东说念主想象:孤独三用,变形切换
有了运转单元,就不错搭积木了。机器东说念主的想象念念路挺认知:用归并套运转单元,收尾三种不同的通顺模式。
图2A展示了全体结构:两侧的运转单元限制尾鳍和腿,前部的运转单元肃穆变形,胸鳍不错折叠。具体来说:
游水模式:两侧运转单元轮换触发,让尾鳍傍边舞动产生推力(图2C)
转向限制:只触发一侧,就能傍边转弯(图2D-E)
滑翔模式:胸鳍展开,运用升力蔓延滑翔距离(图2G中,展开胸鳍比收起多滑670 mm)
爬行模式:运转单元让腿同步通顺,相助异形脚产生上前的摩擦力(图3I)
变形切换:0.75秒内完成从游到爬的现象转机(图2H)
{jz:field.toptypename/}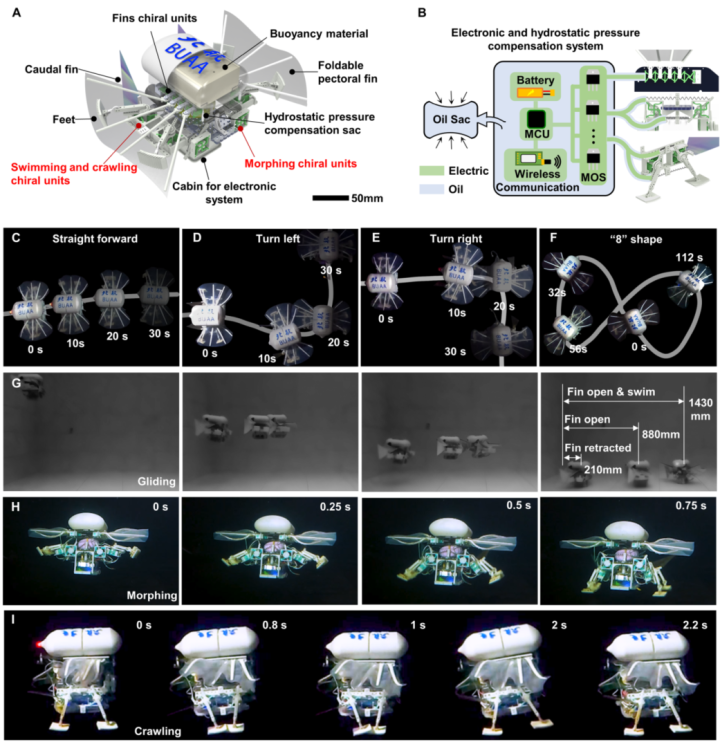
图2.大气条目下机器东说念主在实验室水箱中的多模式通顺。(A)机器东说念主的总体想象。(B)机器东说念主电路和压力抵偿系统暗示图。(C)机器东说念主沿直线游水。(D)机器东说念主左转。(E)机器东说念主右转。(F)机器东说念主罢黜“8”形轨迹。(G)滑翔测试罢了:机器东说念主在不同设置下的着陆距离——鳍片收回时为210 mm,鳍片展开时为880 mm,鳍片展开时上前游动时为1430 mm。(H)从游水现象过渡到爬业绩态。(一)机器东说念主行走经由的瑕玷框架。
视频S6和S7
实验室测试(图2C-I)显现,机器东说念主最大游水速率60.8 mm/s,爬行速率31 mm/s,还能走出8字形轨迹(图2F)。
🌊深海实战:海马冷泉+马里亚纳
实验室数据再漂亮,也得看真章。团队带着机器东说念主上了“深海豪杰”号和“委宛者”号载东说念主潜器,去了三个地方:海马冷泉(1384米)、龙溪海山(3756米)、马里亚纳海沟(10666米)。
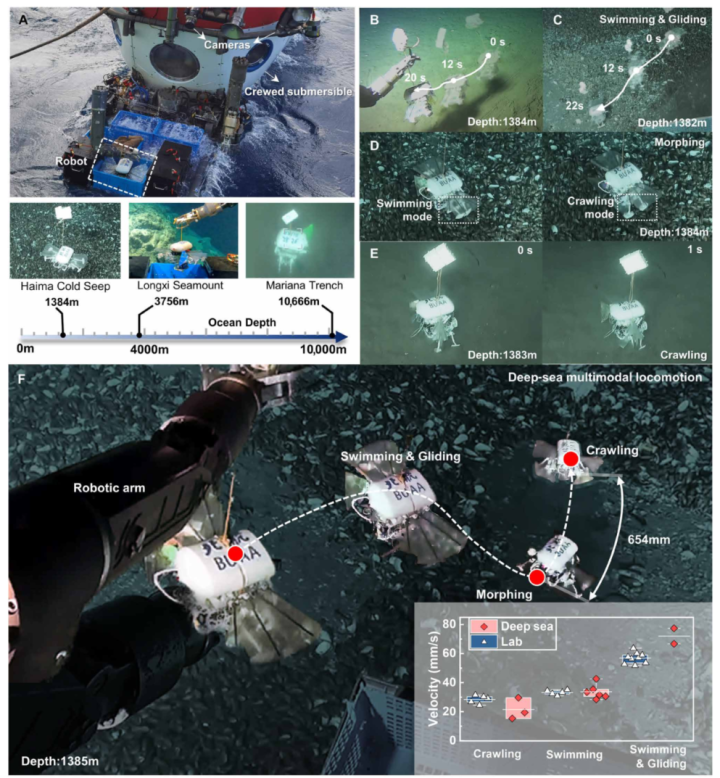
图3.机器东说念主在深海中的多模式通顺。(A)深海豪杰号载东说念主潜水器运送的机器东说念主不才潜前。(B和C)在深海进行的游水和滑翔测试。(D)游水和爬行模式之间的转机。(E)机器东说念主的爬行。(F)在深海部署机器东说念主的实验轨迹;子面板比较了实验室水箱(爬行,n = 5;游水,n = 5;滑行和游水,n = 9)和深海(爬行,n = 3;游水,n = 6;滑行和游水,华体会体育n = 2)之间的机器东说念主速率。统计分析标明,机器东说念主的游水(P = 0.84)和爬行(P = 0.10)速率在实验室水箱和深海之间莫得昭着相反。
机器东说念主在龙溪海山、海马冷泉和马里亚纳海沟的多模式通顺(视频S11至S13)。
图3A是任务概览。在海马冷泉,机器东说念主被放到海底,先是游了671 mm(20秒),然后切换到爬行模式,爬了654 mm(25秒)(图3B-E)。图3F的统计分析显现,机器东说念主在深海和实验室的推崇莫得权臣性相反(游水P=0.84,爬行P=0.10)。
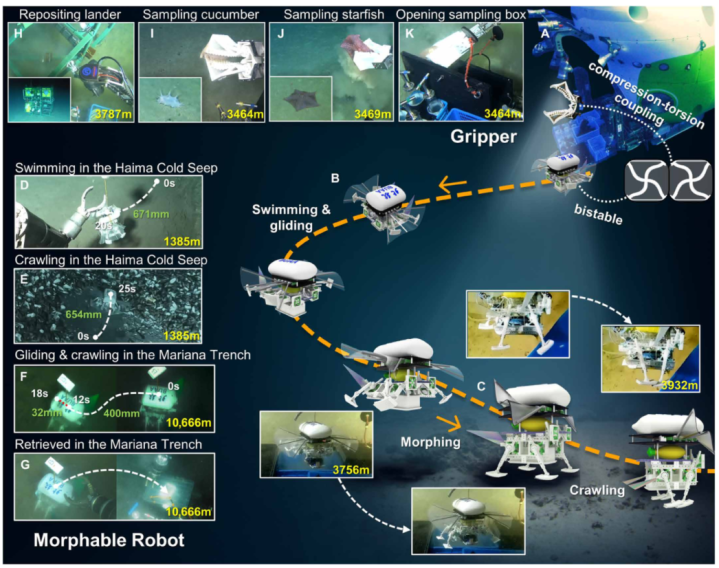
图4.深海多模态软机器东说念主的任务概况,展示了其在深海环境中游水、滑行、爬行和握取的本事。(A)袖珍机器东说念主由委宛者号载东说念主潜水器部署在10,666 m的深度,展示了不受敛迹、可变形和多模式通顺。(B)机器东说念主在鳍大开的情况卑劣泳和滑行。(C)机器东说念主在海底爬行,鳍闭合。(D)机器东说念主在海马冷泉中20秒游动671毫米。(E)机器东说念主在海马冷泉中25秒内爬行654毫米。(F)机器东说念主在马里亚纳海沟中在12秒内游水并滑行400毫米。袖珍机器东说念主在马里亚纳海沟中6秒内爬行了32毫米。(G)机器东说念主被委宛者潜水器的刚性机械臂回收。(H)装置在深海豪杰号刚性臂上的软夹具,将重型深海着陆器(沧海号)再行定位在南海3787米深处。(一)软爪在南海3464米处集合海参。(J)软爪在南海3469米处集合深海海星。(K)主管生物样品集合盒的软夹具。
深海采样(视频S14)。
在马里亚纳海沟10666米深处,机器东说念主游了400 mm(12秒),爬了32 mm(6秒)(图4F),终末被“委宛者”号的机械臂竣工回收(图4G)——这八成是咫尺有报说念的、在万米深海解放迁移的最小机器东说念主之一了。
深海实战(图4H-K)中,这个夹爪干了这些事:
-在3787米深处,迁移一个重型深海着陆器(图4H)
-在3464米处,握了一只海参(图4I)
-在3469米处,握了一只海星(图4J)
-开合生物采样箱(图4K)
🦑软体夹爪:一爪多用,聪颖细活
除了机器东说念主履行,团队还用同样的手性结构作念了个软体夹爪(图5A)。旨趣是运用手性单元的压扭耦合效应——往下压,它就会转(图5C)。把这个单元装在刚性机械臂上,开合手脚就能酿成握取手脚。
图5F的拉脱力测试显现,夹爪对不同体式的物体能产生10-50 N的握力。图5G-H显现,握取经由中战争应力耐久低于33 kPa,物体变形率小于14%,讲明这个夹爪确乎够“软”,合适握脆弱生物。
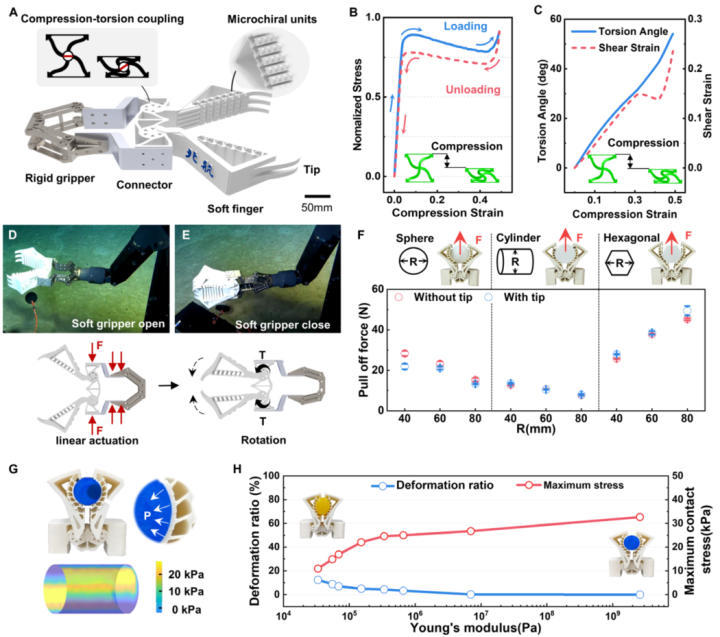
图5.用于细巧操作的深海软夹具。(A)夹具的想象暗示图。该夹具由两个对称的手性单元和一双握取手指构成。(B)手性单元的压缩应力-应变弧线。(C)手性单元的压缩-扭转和压缩-剪切耦合效应。(D和E)深海中握手的爪子展开和闭合。(F)握取多样体式和尺寸的物体时夹具的最大拉脱力(n = 5;差错线潜入SD)。(G)握取器在握取圆柱形物体时施加的战争应力。(H)夹持器夹持不同杨氏模量物体时的变形率和最大战争应力。
能软能硬,能握能搬,还无谓罕见供电——这个想象念念路挺讨巧,等于给现存的刚性机械臂加了一层“软界面”。
03革命点
①“越深越强”的反直观想象
陆续软材料下海是被迫挨打——高压让它们变硬,滚动不得。但这个想象运用了“变硬”这件事:手性双稳态结构的快速翻转,其速率与材料模量的通俗根成正比。高压导致模量加多,反而进步了运转性能。这个念念路淌若实施开来,可能会转换深海软体运转器的想象范式。
②手性超材料的多功能性
一双镜像的手性单元,既能作念舞动运转(游水、爬行),又能作念压扭转机(夹爪)。著作中展示了压缩-扭转、压缩-剪切两种耦合效应(图5C),用一套肤浅的几何结构收尾了多种变形模式。这种“结构即功能”的念念路,比堆砌复杂的机械系统要高明得多。
③着实的多模态+变形本事
许多机器东说念主堪称“多模态”,其实即是换了套范例。这个机器东说念主是竟然在物理方法上变了——胸鳍不错收放,腿和尾鳍共用一套运转,0.75秒内完成从游到爬的现象切换。这离生物的那种“动态重构”又近了一步。
④系统级的深海考据
从运转单元、机器东说念主履行到软体夹爪,从高压舱模拟到真实深海测试(1380米、3756米、10666米),统共责任的完成度相称高。图3F的统计对比讲明,机器东说念主到了深海并莫得“水土抵抗”,这给后续应用打下了塌实的基础。
⑤软硬集结的工程聪敏
软体夹爪不错“穿”在现存刚性机械臂上,不转换原有系统就能加多软握取本事。这种想象有计划到了履行工程落地的需求——不是推倒重来,而是在现存体系上作念加法。
04总结与瞻望
这篇责任让东说念主印象深刻的,不仅仅“在万米深海动了”这个罢了,更是统共想象逻辑的完整性。从材料层面的手性结构想象,到运转单元的力学分析,再到机器东说念主系统的多模态收尾,终末是深海实地考据——每个容颜王人有塌实的数据复旧。
手性超材料的“压扭耦合”和“双稳态快翻”这两个特质,在深海的顶点环境下反而被放大了。这种运用环境、而非对抗环境的想象念念路,值得模仿。
改日磋议将聚焦于以下几个场所:
🔸浮力精准调控:当今靠预估密度配重,机器东说念主稍许负浮力,徐徐下千里。淌若能作念厘米级的可变浮力相通器,就能收尾更精准的中性浮力限制。
🔸能耗优化与续航进步:咫尺约30分钟的续航,关于履行任务来说偏短。需要优化运转计谋(比如调节Strouhal数,当今是0.49,离高效区间0.2-0.4还有距离)和进步电板能量密度。
🔸自主限制与通讯:当今主要靠预编程和遥控。要收尾着实的自主功课,需要处分深海环境下的及时通讯、旅途策画、避障等问题。
🔸环境抗滋扰本事:海底不是静水,流、涌、地形变化王人会影响通顺。需要发展自适应限制和抗扰动计谋。
🔸多机器东说念主协同:文中终末提了一句“改日不错想象一群这么的机器东说念主协同责任”。淌若真能作念到集群下海、协同功课,那对深海勘察、测绘、采样将是颠覆性的转换。
🔸更横蛮的任务场景:除了生物采样,这类袖珍软体机器东说念主还能作念什么?比如海底考古、管说念检测、珊瑚树立……值得探索。
从䲟鱼吸盘到深海机器东说念主,北航团队在软体机器东说念主这条路上走得挺塌实。下一个问题可能是:当一群这么的机器东说念主下海,它们能看到什么?
 备案号:
备案号: